鄭州科步科技有限公司的KB3.0微型履帶蜘蛛起重機(jī)具有整機(jī)柔性好、操縱方便、結(jié)構(gòu)緊湊、作業(yè)輕便靈活、性能穩(wěn)定、使用可靠、維修方便等優(yōu)點(diǎn)。蜘蛛吊車主要用于大型工程機(jī)械無法進(jìn)入的變電站的電器設(shè)備的拆卸、維修、安裝等,代替以前人拉肩扛的人力手工作業(yè),實(shí)現(xiàn)安全文明生產(chǎn),提高生產(chǎn)勞動效率,降低安全隱患發(fā)生的概率。接下來給大家分享蜘蛛吊車機(jī)器啟動及行走的操作指南。



首先確認(rèn)液壓油注入油量不少于液位液溫計(jì)表容積的3/5后,發(fā)動機(jī)器。
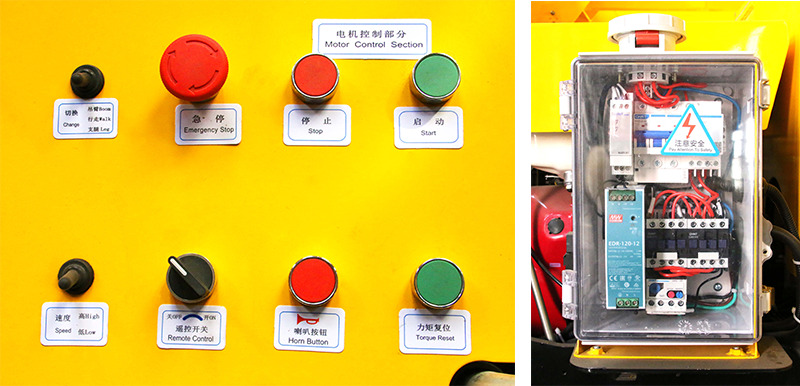
啟動設(shè)備
設(shè)備啟動前,請確認(rèn)鑰匙開關(guān)處于在中間位置(參考標(biāo)示圖),并確認(rèn)行車方向沒有人或其他障礙物。
設(shè)備配備兩套動力系統(tǒng),即發(fā)動機(jī)系統(tǒng)與電機(jī)系統(tǒng),均可實(shí)現(xiàn)設(shè)備的操作。
動力系統(tǒng):
鑰匙開關(guān)共有四個位置。正常停機(jī)狀態(tài)處于停止位置;當(dāng)進(jìn)入冬季,若發(fā)動機(jī)啟動困難,鑰匙開關(guān)左旋到“預(yù)熱”,預(yù)熱10-15秒鐘,發(fā)動機(jī)更容易啟動;鑰匙開關(guān)右旋到“接通”位置,等幾秒鐘,機(jī)器檢查電氣系統(tǒng)(故障指示)完畢,方可啟動。若連續(xù)啟動(中間間隔半分鐘以上)3到4次,還不能啟動,請檢查是否有故障。

電機(jī)系統(tǒng):
如需轉(zhuǎn)換成電機(jī)功能,工業(yè)插座處連上單相380V 50Hz工業(yè)電源,空氣開關(guān)按至ON狀態(tài)再按下電機(jī)啟動按鈕,鑰匙開關(guān)切換至接通檔位,即可開始正常操作。使用電機(jī)吊裝完畢按下停止按鈕,關(guān)閉鑰匙開關(guān)(防止電池耗電虧空)。操作過程中如遇到緊急問題可按下急停按鈕,排除問題后右旋急停按鈕(解除急停狀態(tài)),按下綠色啟動按鈕,重新啟動恢復(fù)作業(yè)。
起重機(jī)行走之前,必須把四個支腿收起放穩(wěn),銷釘插好,同時吊臂處于復(fù)位狀態(tài),否則設(shè)備禁止行走。起重機(jī)操縱有遙控/手動兩種模式,操縱起重機(jī)前需確定起重機(jī)的操縱模式。手動作業(yè)時,確保遙控器撥鈕位于“關(guān)”檔位之后,將設(shè)備操作面板上的吊臂/行走/支腿三檔切換撥鈕切換至對應(yīng)檔位,方可進(jìn)行起重機(jī)的手動作業(yè)。遙控模式作業(yè)時,確保遙控器旋鈕位于“開”檔位之后,無線遙控器打開并連接正常(可通過無線遙控器上的喇叭按鈕確認(rèn)是否連接成功),方可通過無線遙控器進(jìn)行設(shè)備的遙控作業(yè),且遙控模式下,嚴(yán)禁操縱起重機(jī)上手動操縱方式。
起重機(jī)在吊載狀態(tài)下禁止行走。
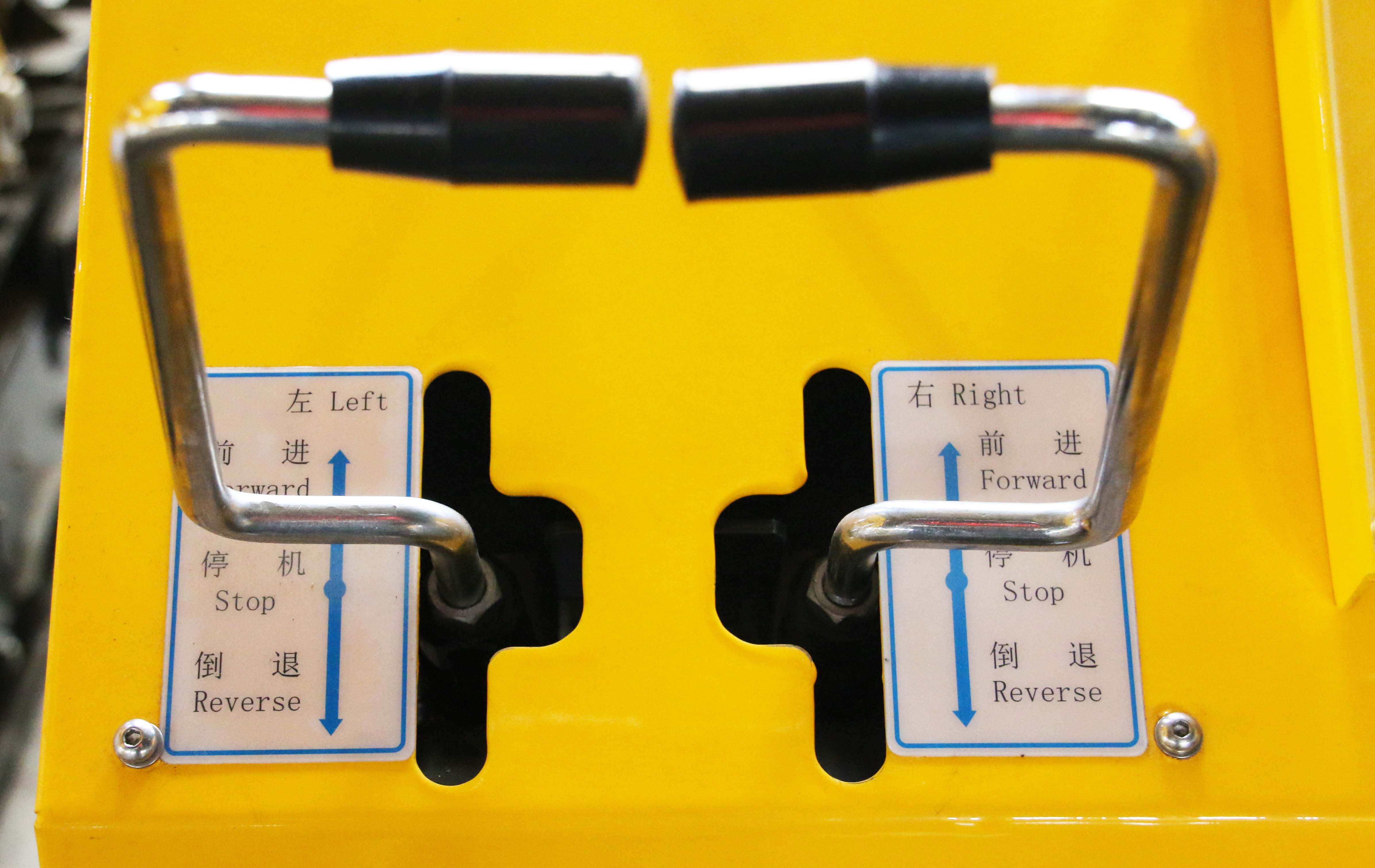
手動模式,遙控器撥鈕位于“關(guān)”檔位,設(shè)備操作面板上的吊臂/行走/支腿三檔切換撥鈕切換至“行走”檔位。通過控制行走閥兩手柄桿來實(shí)現(xiàn)設(shè)備的行走移動,設(shè)備在行走過程中,盡量確保在路面平坦、視野開闊的通道上勻速行走。同時該設(shè)備具有行走雙速,可通過高低速度切換撥鈕中的高、低速檔位的選擇來實(shí)現(xiàn)行走的高、低速切換。

遙控模式,設(shè)備行走功能可通過遙控器來進(jìn)行遠(yuǎn)距離的無線遙控,當(dāng)選擇遙控操控時,需確保遙控器撥鈕位于“開”檔位,無線遙控器連接正常后,方可通過無線遙控器進(jìn)行遙控作業(yè)。將無線遙控器上的吊臂/行走/支腿三檔切換撥鈕切換至“行走”檔位,然后通過左、右行走控制搖桿實(shí)現(xiàn)設(shè)備的行走功能,通過可通過無線遙控器上的高低速切換撥鈕選擇行走速度的高低。
遙控模式下操控設(shè)備時,嚴(yán)禁操縱設(shè)備上行走閥的手柄桿進(jìn)行手動操作。

設(shè)備前進(jìn)或后退
行走閥左右兩個操作手柄桿同時向上側(cè)推動,可實(shí)現(xiàn)設(shè)備的前進(jìn);兩個操作手柄桿同時向下推動,則設(shè)備后退。
設(shè)備轉(zhuǎn)向
行走閥兩行走操作手柄一停一拉動可實(shí)現(xiàn)設(shè)備的轉(zhuǎn)向動作。左側(cè)手柄向上推到前進(jìn)擋,右側(cè)手柄處于停機(jī)檔位,則設(shè)備為右轉(zhuǎn);左側(cè)手柄處于停機(jī)檔位,右側(cè)手柄處于前進(jìn)檔位,則設(shè)備為左轉(zhuǎn)。
設(shè)備停止移動
兩行走操作手柄拉至中位停機(jī)檔位時,設(shè)備停止移動。
以上就是蜘蛛吊車機(jī)器啟動及行走的操作流程。
科步公司提醒您:詳細(xì)了解蜘蛛吊車操作,可以減少機(jī)器損耗,提高工作效率。科步公司以多年的蜘蛛吊車生產(chǎn)經(jīng)驗(yàn)為支撐,不斷提升生產(chǎn)工藝,精益求精,保證為客戶提供更優(yōu)質(zhì)的產(chǎn)品和服務(wù)。歡迎新老客戶前來咨詢!